Our autonomous goal is to press both beacons in autonomous for a total of 60 points. We have 2 choices:
(1) have robot drive along the wall and arm extends out on the side – This is faster but the mechanism will be more complex and take up more space. Also, this might make it harder to score with in teleop.
(2) have robot squaring against the wall and the arm extended to the back: This is easier to prototype but the navigation requires many more turns and is less accurate.
We will decide on a final design after testing #2 and seeing if it works well enough.
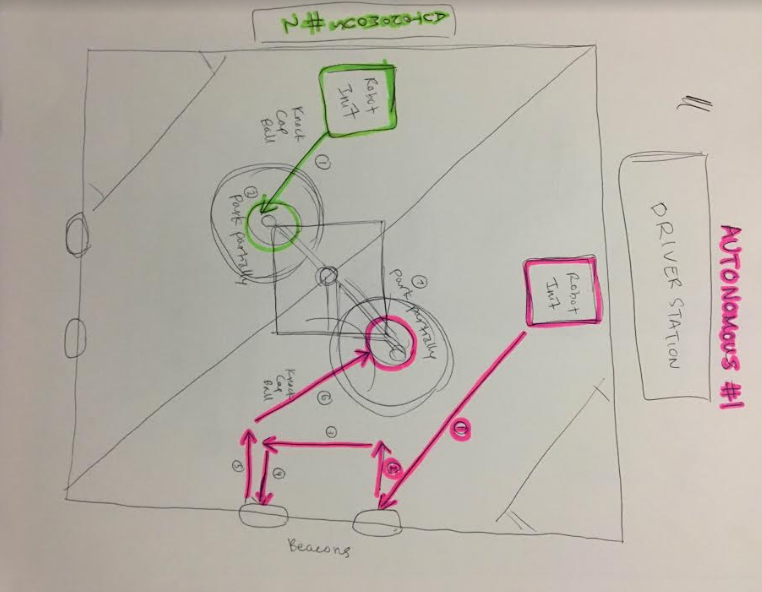
This sketch is our current plan:
We also programmed a basic navigational teleop program for the robot, so the build team can drive it around.
9/17/16 Software