TeleOp:
Harvester options:
- One particle conveyor belt harvester:

- Materials: Wheels, treads, plastic slats
- Pros: accurate placement of particles, reliable
- Cons: Slow, needs extra mechanisms, heavy



Updated materials for building (no prototyping due to necessary movement)0090:
- Tank tread chain links, conveyor paddles, two idler wheels
2. Primary Sweeper:
- Single/Dual sweeper from last year
- Materials: Plastic tubing, wood, zip ties
- Pros: Fast, lighter
- Cons: Takes up a lot of space
Shooter mechanism options:
- Motor resetting spring:
Explanation: This option uses a large spring under a platform that is pushed down by a motor that’s geared for torque. The motor rotates one rotation per shooting and releases the spring at a certain part of the rotation. The release of the spring, releases the particle on the platform and the whole mechanism can be angled for accurate shooting. In between shots a particle will be loaded in to the large spring.
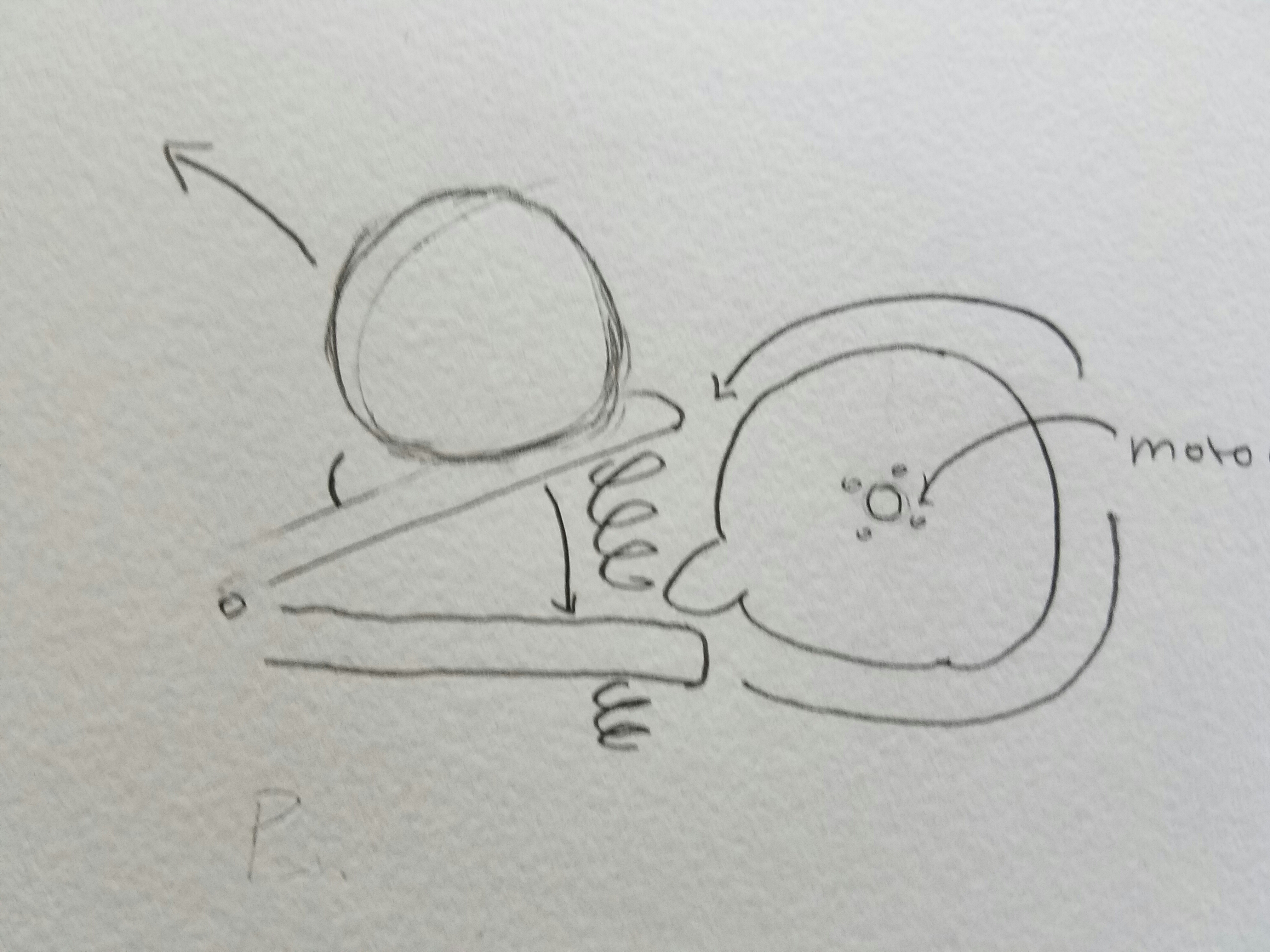
The first version of the spring resetting mechanism was passable other than the fact that the spring would not compress properly which made the shooter very weak and not get high enough to score in the vortex. (Spring on the bottom)
I am using a spring I took from a general sprinkler system which has enough tension to shoot the ball high enough to score. (Spring on the top.)

2. Dual fast motor:
Explanation: In this mechanism two high speed wheels spin opposite directions and a ball is launched due to the pressure of the two wheels and their high speed.
Chassis update: (9/30/2016)
The original two – wheeled back driven geared chassis was meant for speed and durability, and was predicted to have less accuracy then the TRR robot’s. However, from the testing on 9/24/2016, this chassis is too inaccurate and will be changed to be more accurate and still have speed and durability. This two – wheeled back driven geared chassis is a very simple, light, small and easy to make, however in order to make it more accurate, it will have to be a little more complex and heavy like the TRR robot’s chassis.
New Chassis options:
- 2 motor 4 wheel drive; chained for speed (Similar to TRR except gear ratios are swapped)
- Pros: Just like the TRR robot, will probably be precise, and thanks to experience will require less repairing and tightening, high speed
- Cons: Hard to hold
2. 2 motor 2 center wheel geared drive, 6 wheels
- Pros: Quick turns
- Cons: Less space, heavy, doesn’t go as straight, not as fast, little wobble
3. 4 motor 6 wheel drive, 6 wheels
- Pros: Quick turns, probably precise, strong
- Cons: Heavy, little space, hard to hold, tedious to make, little wobble
For Meet 1 the new chassis will likely be the TRR chassis except for the gear swap for speed (option 1) since it was extremely successful in TRR except for its required repairs and we don’t have time to try entirely new chassis.
Beacon attachment: (9/30/2016)
The original beacon attachment was meant to be quick, really close to the beacon when against the wall, and fast. It accomplishes all 3 of these only when the robot is really secure to the wall (the wall doesn’t move in relation to the mat). Since this attachment works around 0% of the time without a secure wall, and the lessons learned from last season about design margins, the attachment will be changed. This original attachment was one large servo that would rotate a plate, and both sides of the plate would press either button. Although it is simple, and takes up the least space possible, it is not strong enough to press the button, and the attachment itself is fragile.
New Beacon mechanism design: (fix the run ons)
Not enough valid designs were brainstormed, so the only remaining option is to have the robot press the button using the forward force of its chassis, just like in Super Regionals. The original intended autonomous strategy was to have the robot drive into the wall, and then the attachment, which would be really close to the button, would move and press the button. However since it is difficult to produce enough force to push the button, the strategy will change:
- An ultrasonic sensor will place the robot around 2 inches away from the beacon
- The color sensor will detect the beacon
- There will be an aluminum beam that will be used to push the buttons during teleop (the team already saw this in the 9/24 meeting), however one of two servos will move down an L shaped piece that will rest on the aluminum, so that one side of the robot will be slightly extended further than the other
- The robot will drive forward, and the extended side will press the button
- The robot will drive 1 cm away from the beacon
- The servo will move up
- The robot will square up with the border and continue
Even though this feels complicated it is still simpler than the Super Regional autonomous strategy, and is most likely possible.
After autonomous ends, both servos will move out of the way from the front of the aluminum beam, since the extensions are not necessary since either button can be pressed to work in teleop. Because of this, in teleop the robot just has to ram the aluminum bar against the beacon which was tested successful from the 9/24/2016 meeting.