Shooter and harvester placements on the robot:
The shooter and harvester will both be centered left and right of the robot. The shooter will be in the center of the robot a few inches above the center beam chassis.
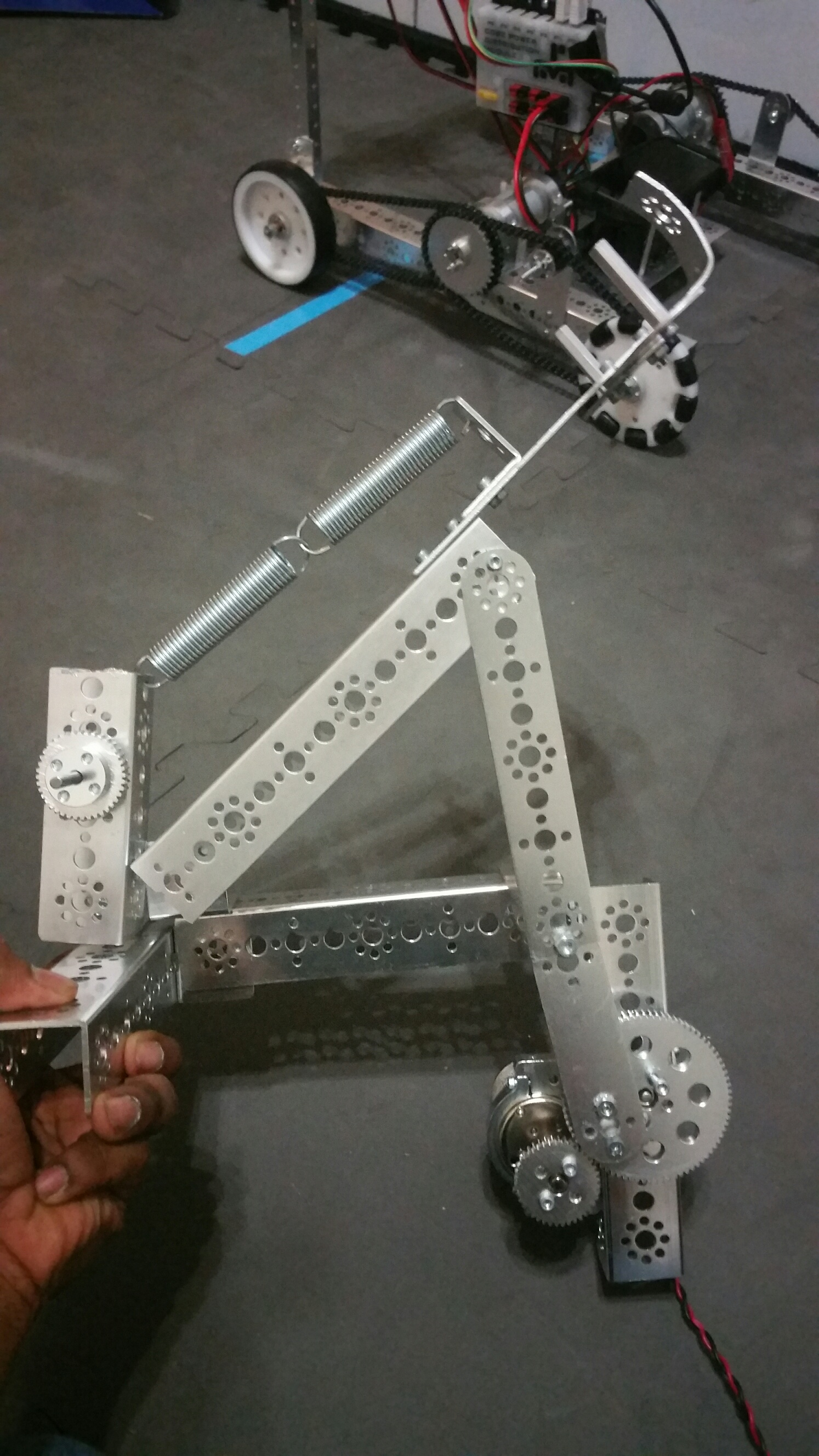
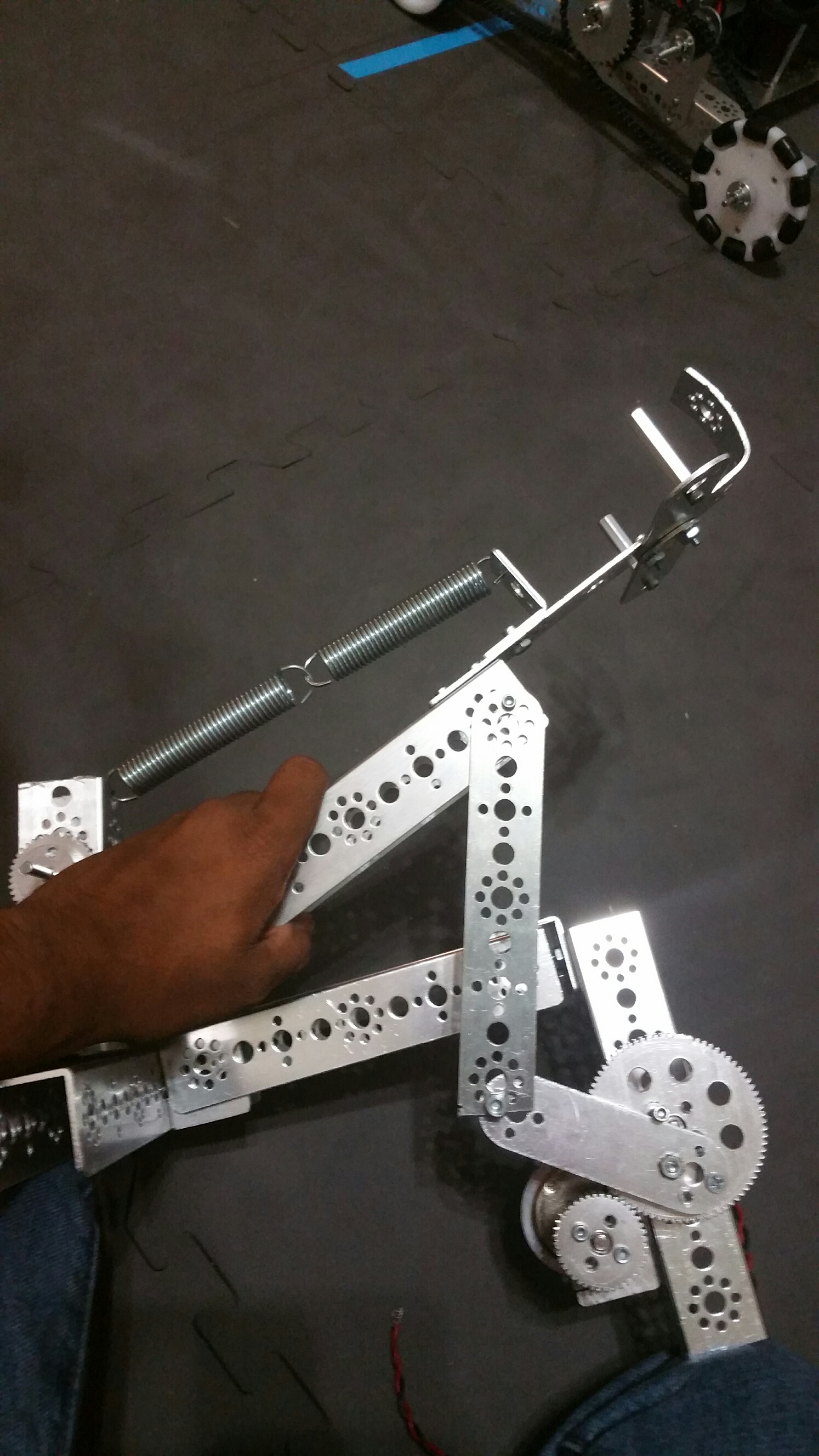
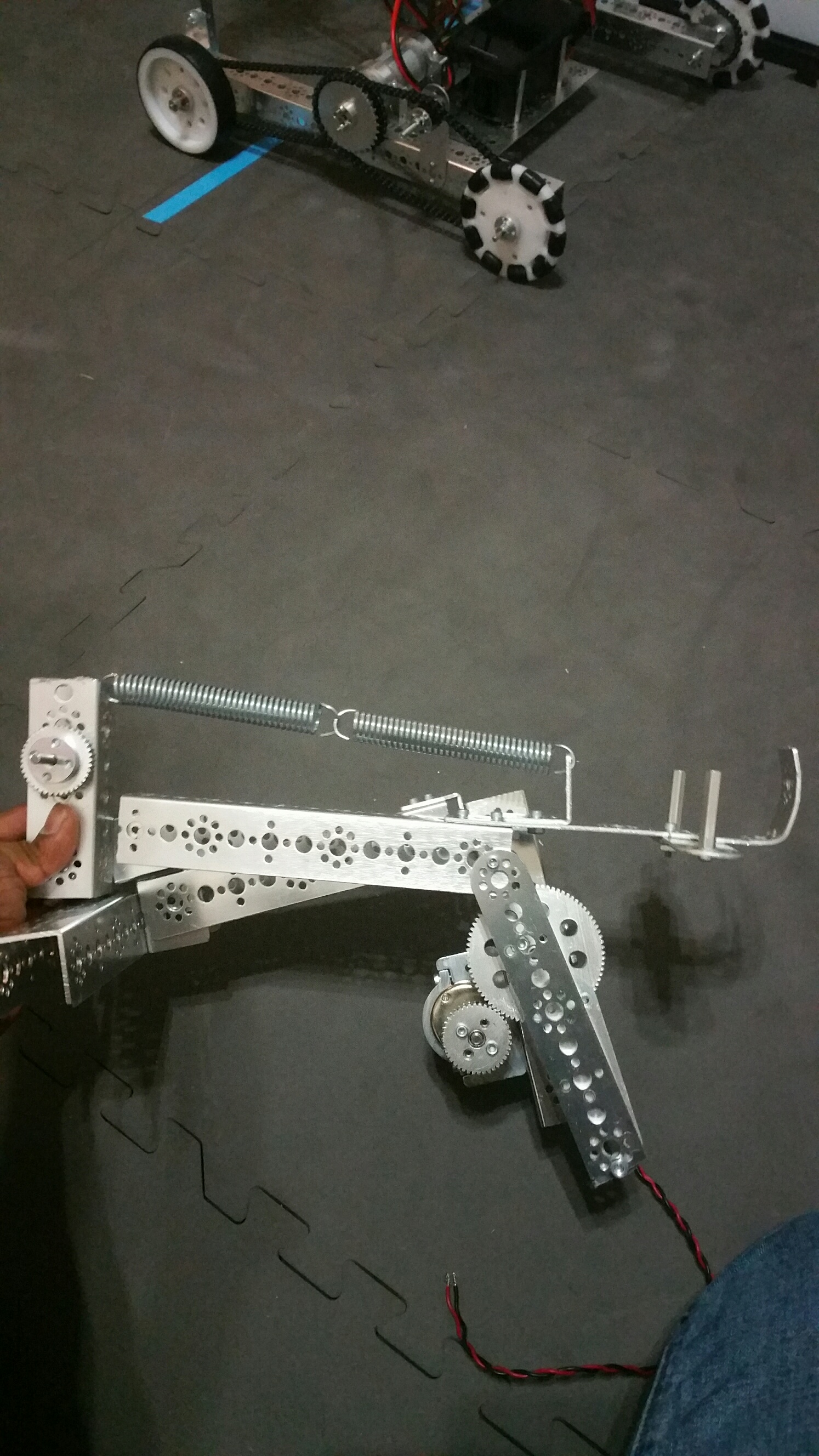
Shooter mechanism:
The new shooter mechanism utilizes the extension springs to be able to shoot a good distance, the extension springs allow for the motion to be guided through the tension force.
Harvester mechanism:
We decided that the Tetrix chain pack would be too space consuming and would be easier with rubber bands.
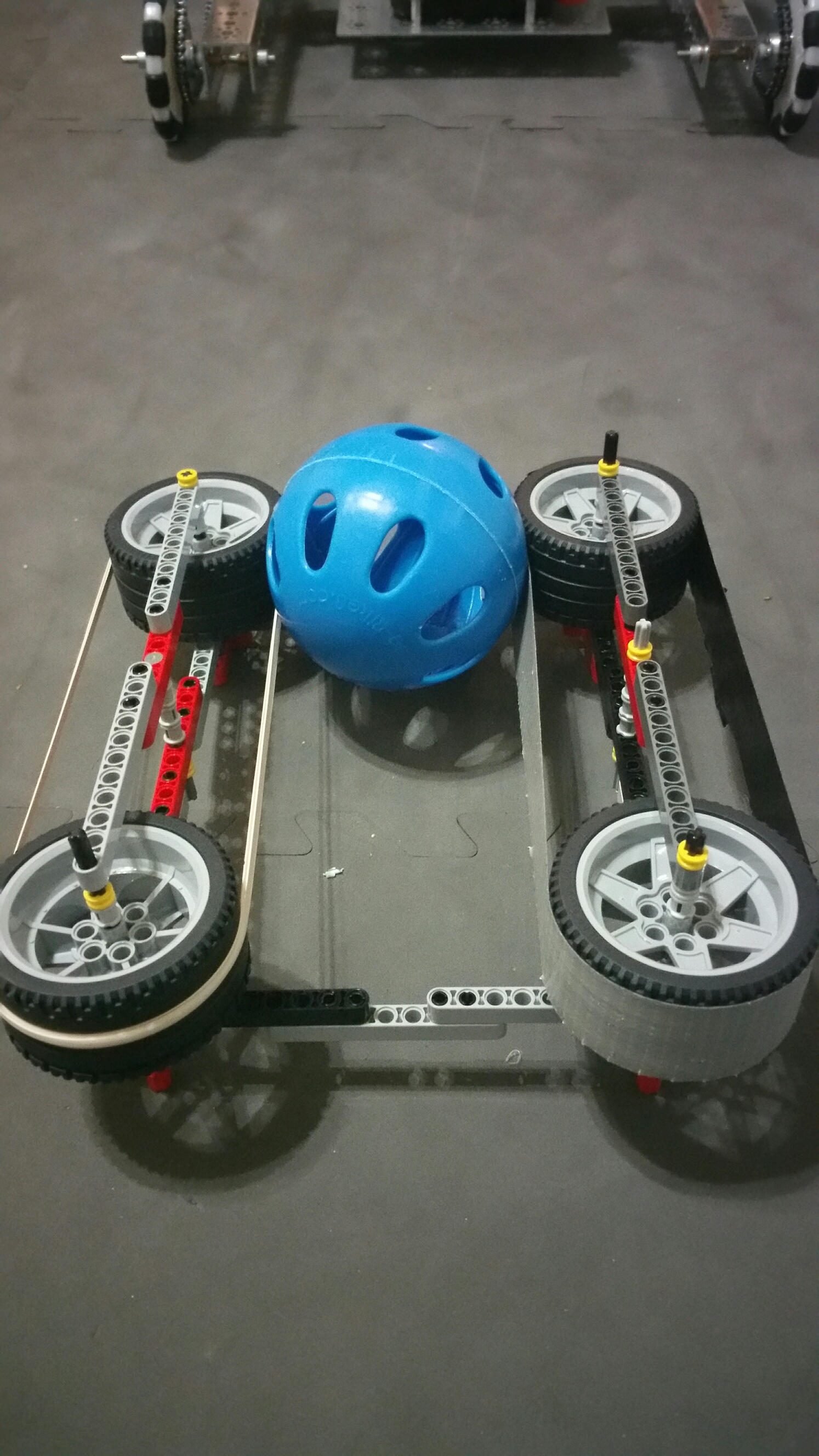
Lego Harvester Prototype:
- Lego wheels are preferred as of now
- Thick rubber bands from auto shop can be used to pull ball up
- Duck tape for increased friction
- A servo can be used to align the ball to the servo
10/9/16 Hardware