This week one of the main priorities was making the robot able to store multiple balls after it is sweeped in. Before on the old robot, the shooter could hold one ball before affecting the shooting.
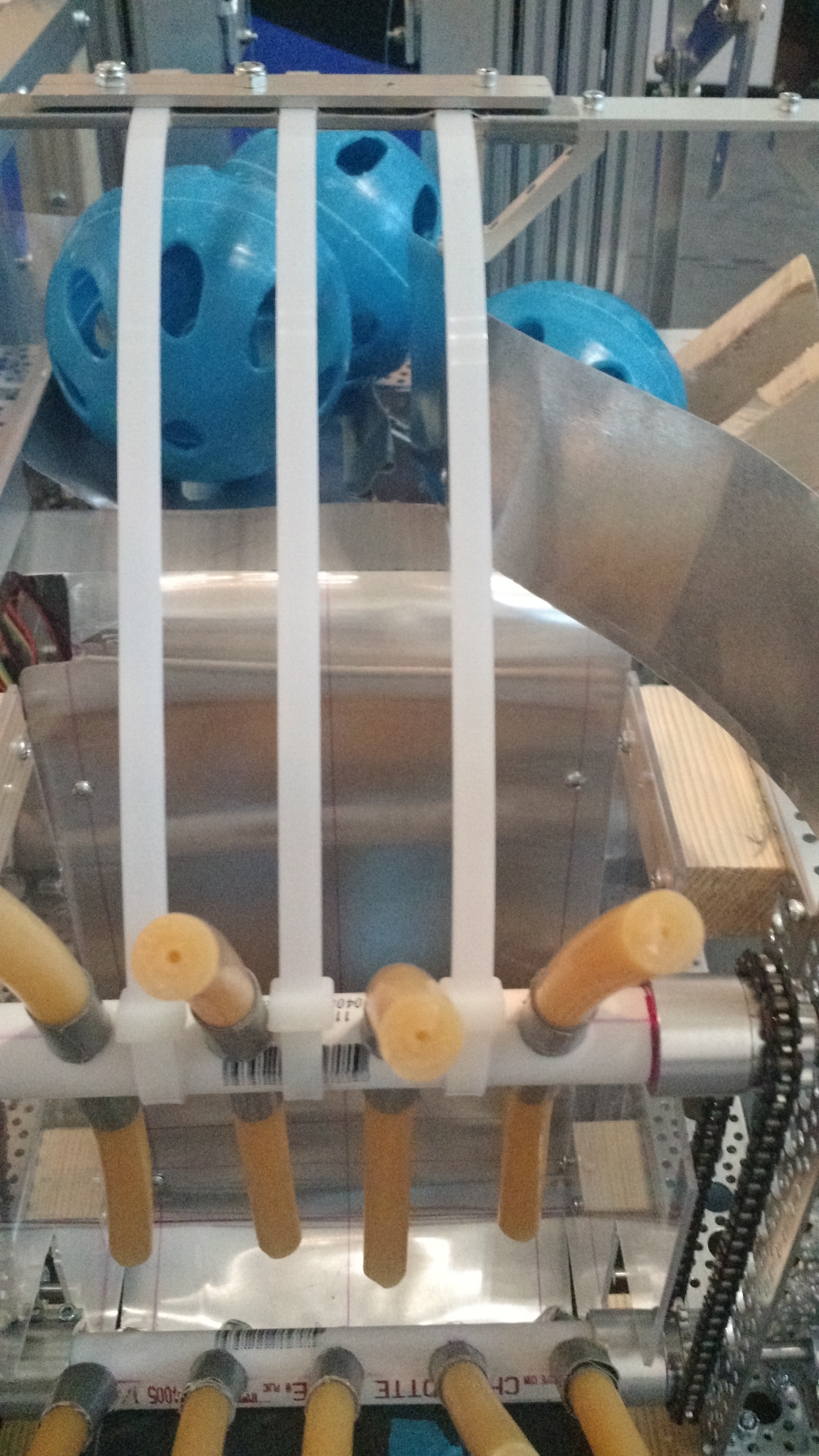
On the new robot, the shooter can hold one ball, and there will be room to hold two more particles that do not make contact with the particle on the shooter.
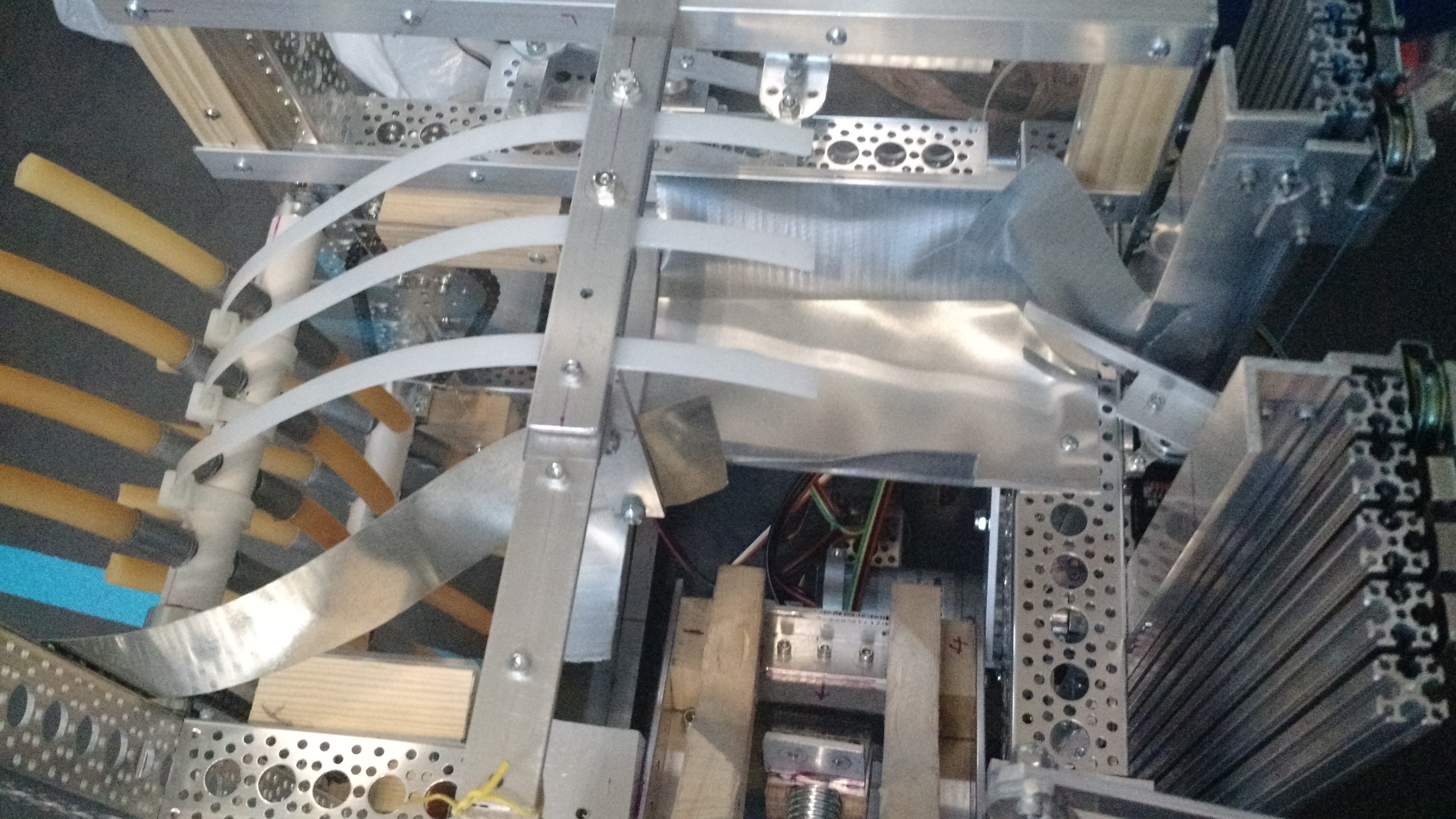
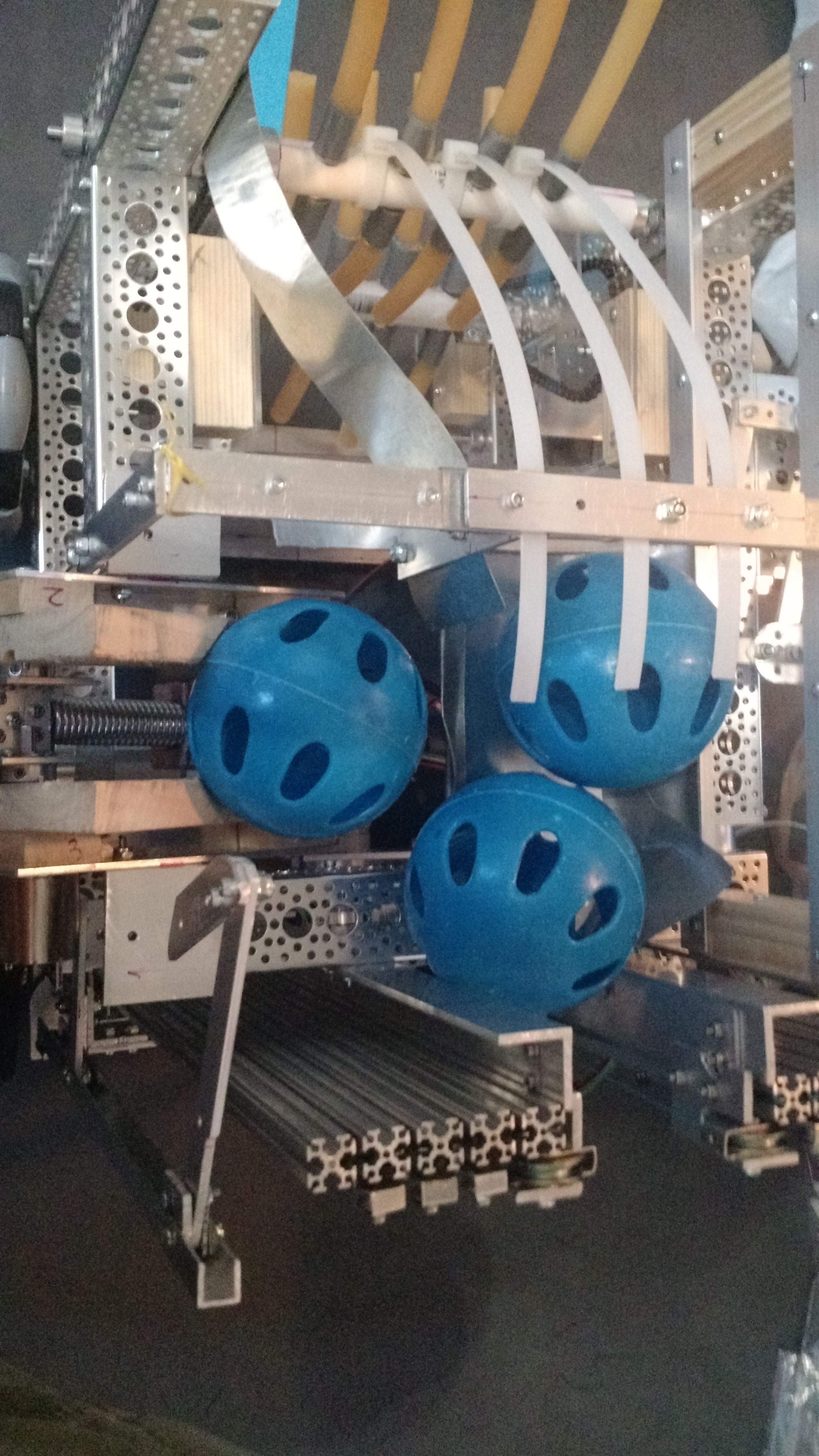
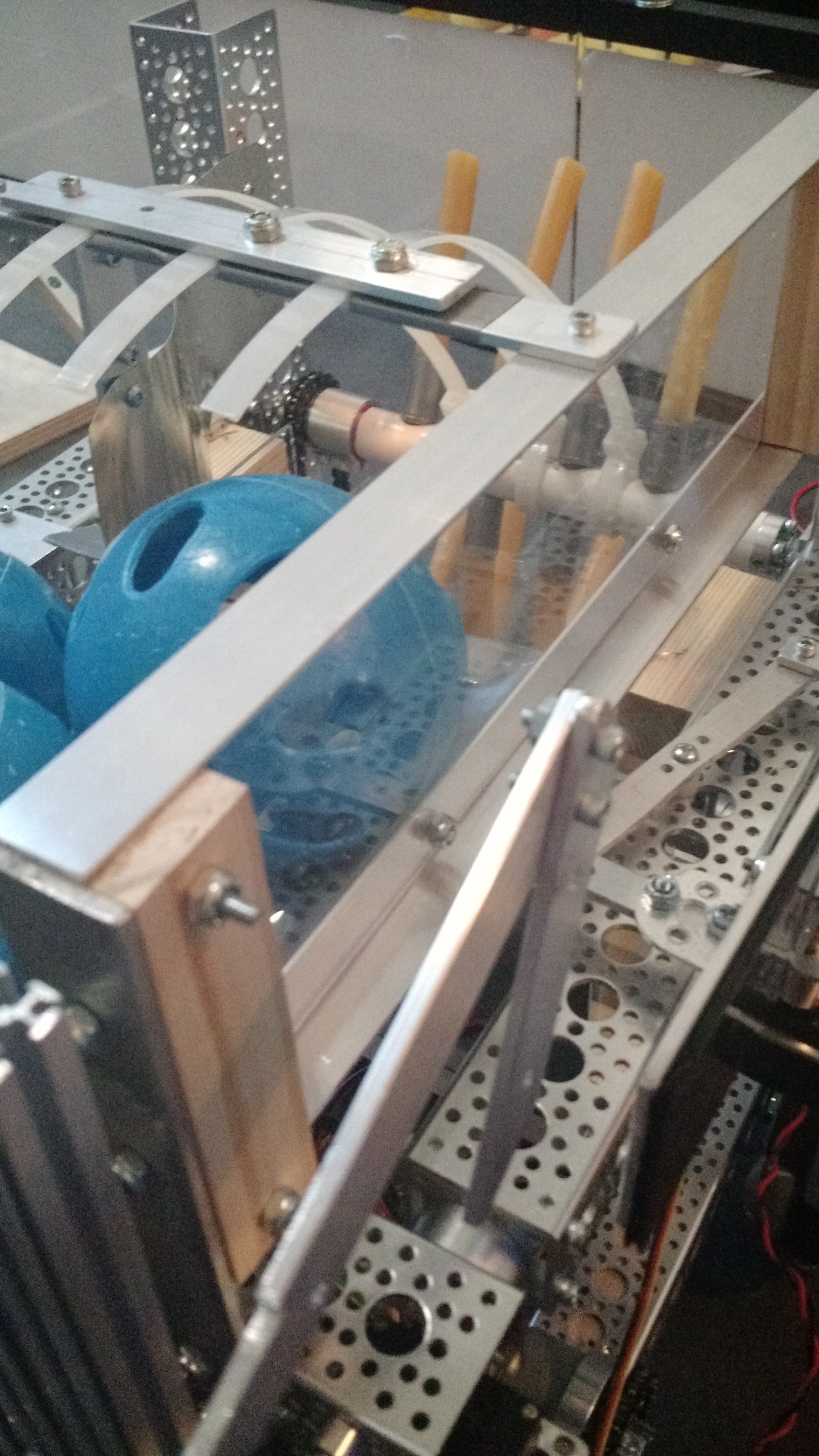
Additionally, instead of using a comb shaped mechanism to help guide the particles forward on the old robot, we will use zip ties that rotate around the PVC that hold the rubbers.
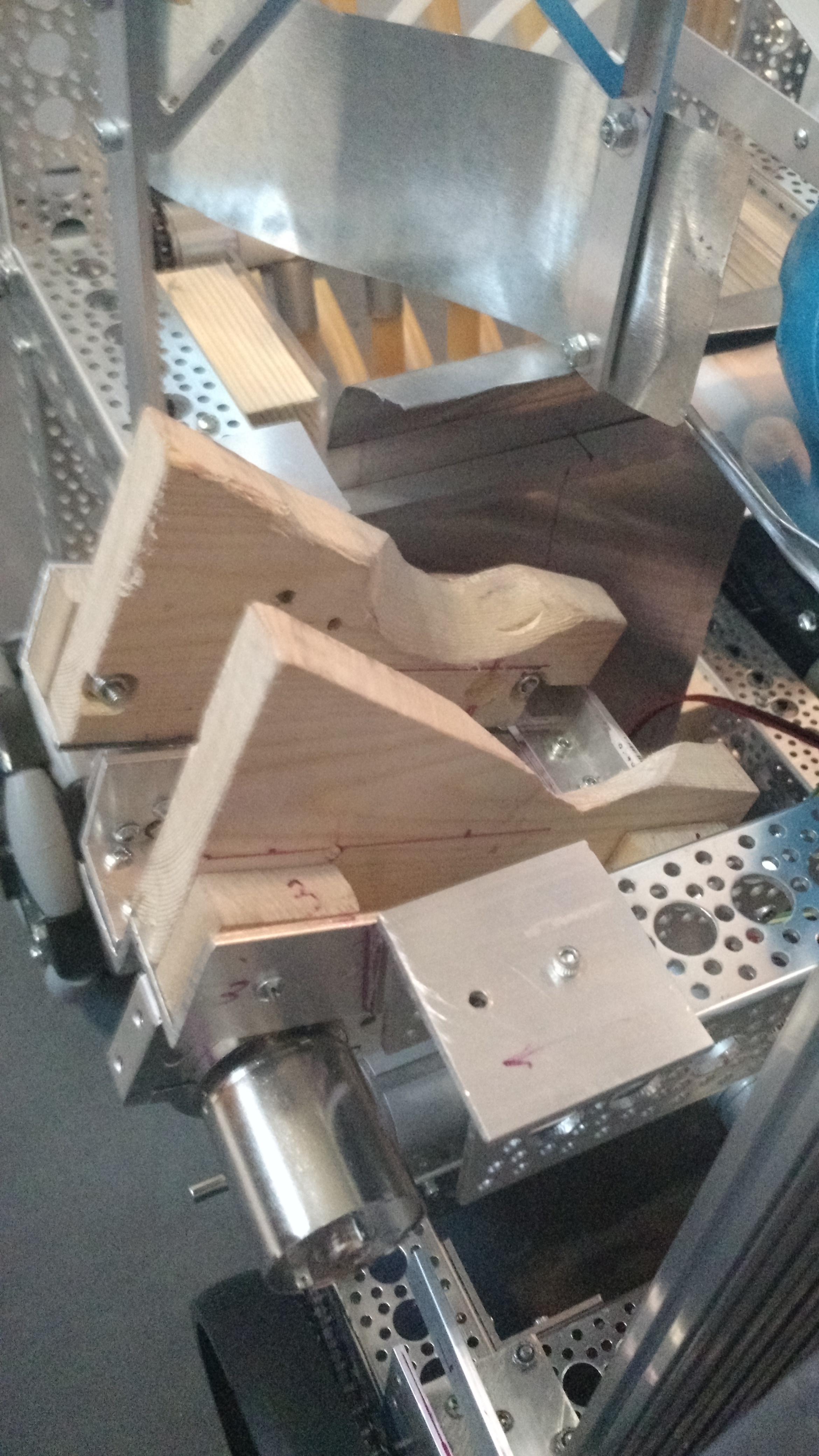
The shooter of the robot is also updated so that there is a wooden slope that prevent particles from rolling out.
There will also be a clear wall on the side of the pathway from the sweeper to the shooter so the user can see through, however we might add the team numbers on it.